Welcome to the OPTPDE Problem Collection
wavebnd1 details:
Keywords: analytic solution
Global classification: convex
Functional: convex nonlinear
Geometry: easy, fixed
Design: coupled via boundary values 0th order
Differential operator:
- Wave:
- linear hyperbolic operator of order 2.
- Defined on a 1-dim domain in 1-dim space
- Time dependent.
Design constraints:
- none
State constraints:
- box of order 0
Mixed constraints:
- none
Submitted on 2013-02-07 by Roland Herzog. Published on 2013-02-12
wavebnd1 description:
Introduction
This is an exact controllability problem for the one-dimensional wave equation by Dirichlet boundary actuation. Such problems were thorougly analyzed in Gugat et al. [2005], where the present problem appears as Example 1.
Variables & Notation
Unknowns
Given Data
The given data is chosen in a way which admits an analytic solution.
Problem Description
Optimality System
An optimality system is not provided in Gugat et al. [2005] but rather the exact solution is constructed analytically.
Supplementary Material
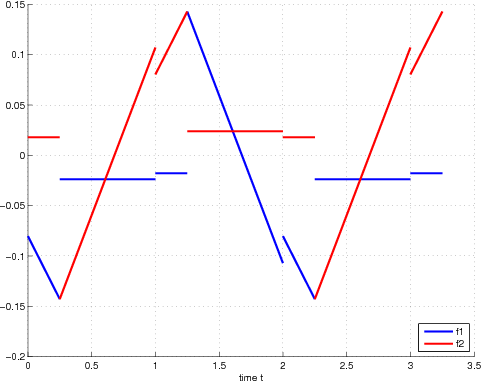
An optimal control can be derived analytically from [Gugat et al., 2005, Theorem 2.2]:
This pair of optimal controls may not be unique, but it is the unique one with minimal norm. The corresponding displacement is piecewise linear, and the optimal velocity is piecewise constant on areas bounded by characteristic curves of the equation . Figure 0.1 displays the optimal controls. A plot of the optimal displacement is provided in [Gugat et al., 2005, Figure 2.1].
References
M. Gugat, G. Leugering, and G. Sklyar. -optimal boundary control for the wave equation. SIAM Journal on Control and Optimization, 44(1):49–74, 2005. ISSN 0363-0129. doi: 10.1137/S0363012903419212.