Welcome to the OPTPDE Problem Collection
mpccdist2 details:
Keywords: analytic solution
Global classification: nonlinear-quadratic
Functional: convex quadratic
Geometry: easy, fixed
Design: coupled via volume data
Differential operator:
- Elastoplasticity:
- nonlinear elliptic - VI operator of order 2.
- Defined on a 2-dim domain in 2-dim space
- No time dependence.
Design constraints:
- none
State constraints:
- none
Mixed constraints:
- none
Submitted on 2014-04-23 by Thomas Betz. Published on 2014-05-27
mpccdist2 description:
Introduction
We consider the optimal control of static elastoplasticity with linear kinematic hardening. This
leads to an optimal control problem governed by an elliptic variational inequality of first kind
in mixed form or, equivalently, an MPCC in function space.
The objective functional tracks the state both on the entire domain and additionally on a
submanifold of the domain. The control cost is taken into account by a tracking type
term as well. There are no constraints on the control, which acts in a distributed
way on the domain. The Dirichlet boundary is the entire boundary of the domain.
A locally optimal control is known, whose corresponding state has a bi-active set with a
positive measure.
The problem and its solution are taken from [Betz et al., 2014, Section 6.1].
Variables & Notation
Unknowns
The state is composed of the stress , back stress , displacement and plastic multiplier .
Given Data
desired displacement in the domain:
with
desired displacement on the submanifold :
desired control:
Problem Description
With the given Lamé coefficients, the inverse elasticity and hardening tensors read
where is the identity mapping and
The yield function is given by
where denotes the Frobenius norm of a matrix. The corresponding inner product is used in the calculation of .
Optimality System
According to [Betz and Meyer, 2015, Theorem 4.6] (Theorem 4.4 in the Preprint)
the following conditions are sufficient for local optimality of the control
with associated
state .
There exist adjoint variables
and multipliers
satisfying
- the optimality system
- the second-order condition
There exists such thatholds for all and solving
The sets are defined as follows,
and the Lagrangian is defined by
Consequently is given as follows:
Supplementary Material
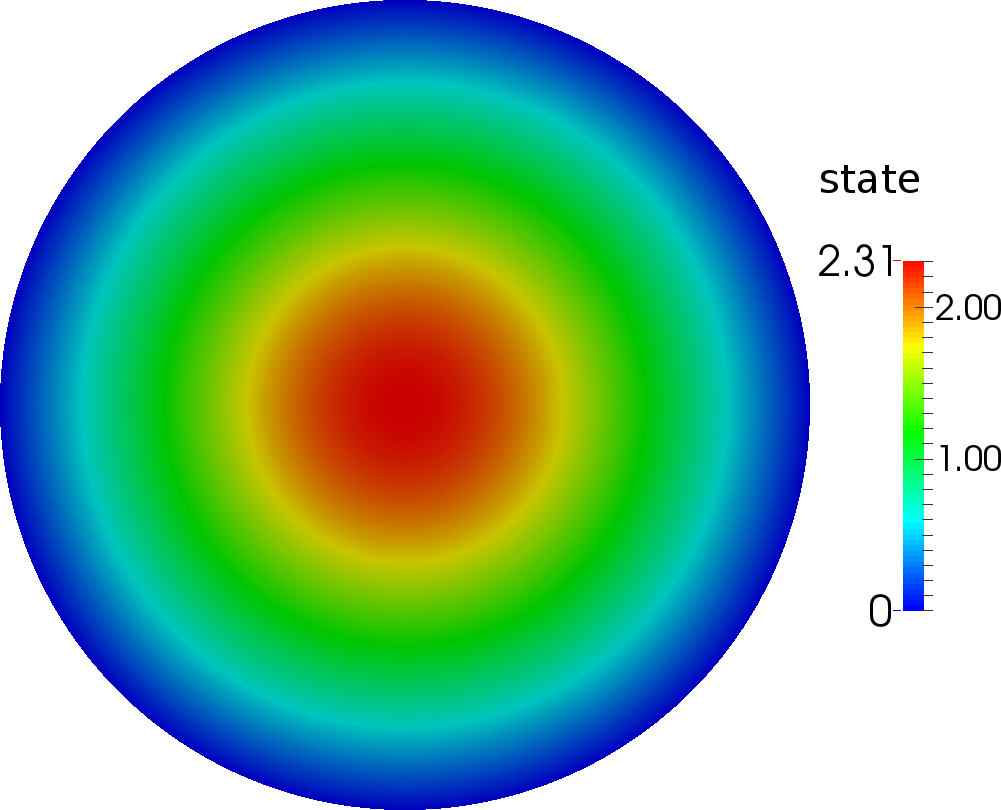
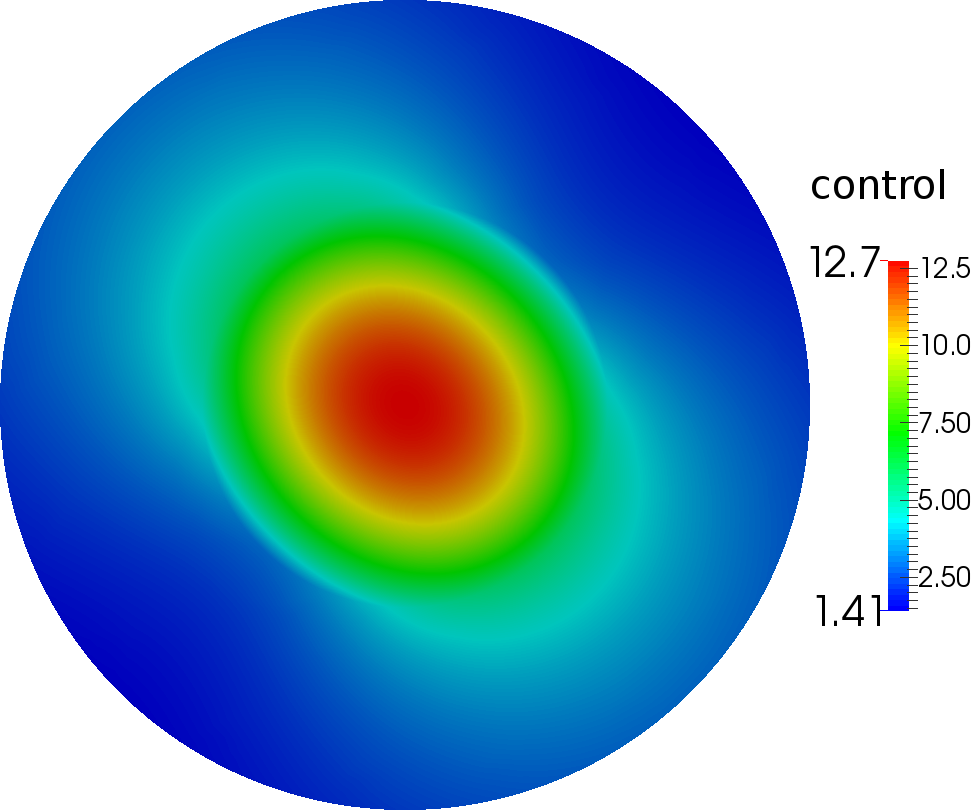
Locally optimal control, state, adjoint state and multipliers are known analytically:
The magnitude of the optimal state and control for the values and as given in Betz et al. [2014] are depicted in Figure 0.1. The reference value for the objective,
corresponding to these values of and is given in Betz et al. [2014].
Revision History
- 2015–04–22: Updated reference to the published version.
- 2014–11–29: Explicit formulas for the second-order derivative of the Lagrangian added. Formulas for optimal and added. Pictures of the optimal solution added. Reference for objective value added. Matlab code added.
- 2014–04–23: problem added to the collection
References
T. Betz and C. Meyer. Second-order sufficient optimality conditions for optimal control of static elastoplasticity with hardening. ESAIM: Control, Optimisation and Calculus of Variations, 21(1):271–300, 2015. doi: 10.1051/cocv/2014024.
T. Betz, C. Meyer, A. Rademacher, and K. Rosin. Adaptive optimal control of elastoplastic contact problems. Technical report, Fakultät für Mathematik, TU Dortmund, May 2014. URL http://www.mathematik.tu-dortmund.de/papers/BetzMeyerRademacherRosin2014.pdf. Ergebnisberichte des Instituts für Angewandte Mathematik, Nummer 496.